DDIM
Denoising Diffusion Implicit Models
Table of contents
- OverView
- Background
- Variational Inference for non-markovian Forward Process
- Sampling from Generalized Generative Process
- Experiments
OverView
- DDPM은 markov chain을 기반으로 denoising process를 수행함
- 하지만, 모든 step을 거쳐야하기 때문에 denoising 속도가 느림
- DDIM은 \(x_0\)를 condition으로, markov chain을 끊었기 때문에 빠른 속도로 step을 건너뛰며 denoising이 가능함
Background
\[\begin{align} p_\theta(x_0)&=\int p_\theta(x_{0:T})dx_{1:T}, \quad\text{where}\quad p_\theta(x_{0:T}):=p_\theta(x_T)\sum^T_{t=1}p^{(t)}_\theta(x_{t-1}\mid x_t) \\ \max_\theta\mathbb{E}_{q(x_0)}&\left[ \log p_\theta(x_0) \right] \leq \max_\theta\mathbb{E}_{q(x_0, x_1, \ldots , x_T)}\left[\log p_\theta(x_{0:T})-\log q(x_{1:T}\mid x_0) \right] \\ q(x_{1:T}\mid x_0)&:=\sum^T_{t=1}q(x_{t}\mid x_{t-1}), \quad\text{where}\quad q(x_{t}\mid x_{t-1}):=\mathcal{N}\left(\sqrt{\frac{\alpha_t}{\alpha_{t-1}}}x_{t-1}, \left(1-\frac{\alpha_t}{\alpha_{t-1}} \right)I \right) \end{align}\]- Forward Process
DDPM에서는 \(x_T\)가 gaussian noise이고, trainable mean, fixed variance일 때, 아래와 같이 나타난다.
\[\begin{align} L_\gamma(\epsilon_\theta):=\sum^T_{t=1}\gamma_t\mathbb{E}_{x_0\sim q(x_0), \epsilon_t\sim \mathcal{N}(0, I)}\left[\parallel\epsilon^{(t)}_\theta\left(\sqrt{\alpha_t}x_0+\sqrt{1-\alpha_t}\epsilon_t \right)-\epsilon_t \parallel^2_2 \right] \end{align}\]\(T\)가 몇 단계의 noising step일지에 대한 hyperparameter이기 때문에 중요(클수록 gaussian에 가까워짐)하지만, step이 커질수록 denoising process가 느려짐(많아짐).
Variational Inference for non-markovian Forward Process
Reverse process는 inference의 근사이므로 iteration을 줄이기 위한 inference 과정을 생각
DDPM은 \(p(x_t\mid x_0)\)에 대한 objective function을 사용하고, \(p(x_{1:T}\mid x_0)\)의 joint distribution을 직접적으로 사용하지 않음
따라서, 반복적인 marginal이 계산되고, 저자는 non-markovian으로 inference를 수행할 수 있는 방법을 탐색함

Non-markovian Forward Process
\(q\)를 inference familiy라 가정하고, index \(\sigma\in\mathbb{R}^T_{\ge 0}\)일 때,
\[\begin{align} q_\sigma(x_{1:T}\mid x_0)&:=q_\sigma (x_T\mid x_0)\sum^T_{t=2}q_\sigma(x_{t-1}\mid x_t, x_0), \\ &\text{where}\quad q_\sigma(x_T\mid x_0)=\mathcal{N}(\sqrt{\alpha_T}x_0, (1-\alpha_T)I) \\ q_\sigma(x_{t-1}\mid x_t, x_0)&:=\mathcal{N}\left(\sqrt{\alpha_{t-1}}x_0+\sqrt{1-\alpha_{t-1}-\sigma^2_6} \cdot \frac{x_t-\sqrt{\alpha_t}x_0}{\sqrt{1-\alpha_t}, \sigma^2_t I} \right) \\ &\text{where}\quad \alpha_T=\sum^t_{s=1}(1-\beta_s),\;q_\sigma(x_t\mid x_0)\mathcal{N}(\sqrt{\alpha_t}x_0, (1-\alpha_t)I) \end{align}\]따라서, joint inference distribution이 marginal이 됨
Forward process는 다음과 같이 나타나고, \(x_t\)가 \(x_{t-1}, x_0\)에 의존하므로, markovian이 아님
\(\sigma\)가 충분히 작으면, \(x_0, x_t\)에 대해 \(x_{t-1}\)은 fix가 됨
Generative Process and Unified VAriational Inference Objective
\(q_\sigma(x_{t-1}\mid x_t, x_0)\)를 알 때, \(p_\theta(x_{0:T})\)를 학습
직관적으로, \(x_t\)가 주어지면, \(x_0\)를 예측하고, reverse \(q_\sigma(x_{t-1}\mid x_t, x_0)\)를 이용하여 \(x_{t-1}\)를 얻음
\(x_t\)가 주어지면, \(\epsilon^t_\theta(x_t)\)는 \(x_t\)에서 \(\epsilon_t\)를 추론하고,
\(x_0\)의 denoised prediction은
따라서, generative process는
\[\begin{align} p^{(t)}_\theta(x_{t-1}\mid x_t)= \begin{cases} \mathcal{N}(f^{(1)})_\theta(x_1),\sigma^2_1I & \text{if }t=1 \\ q_\sigma(x_{t-1}\mid x_t,f^{(t)}_\theta(x_t)) & \text{otherwise,} \end{cases} \end{align}\]\(\theta\)의 optimize는
\[\begin{align} J_\sigma(\epsilon_\theta)&:=\mathbb{E}_{x_{0:T}\sim q_\sigma(x_{0:T})}\left[\log q_\sigma(x_{1:T}\mid x_0 - \log p_\theta(x_{0:T})) \right] \\ &=\mathbb{E}_{x_{0:T}\sim q_\sigma(x_{0:T})}\left[q_\sigma(x_T\mid x_0)+\sum^T_{t=2}\log q_\sigma(x_{t-1}\mid x_t, x_0)=\sum^T_{t=1}\log p^{(t)}_\theta(x_{t-1}\mid x_t)-\log p_\theta(x_T) \right] \end{align}\]Lemma 1.
\(J_\sigma(\epsilon_\theta)\)는 \(\sigma>0\)일 때, \(L_\gamma+C\)와 같다.
\(L_\gamma\)은 각 \(t\)에서 \(\theta\)를 공유하지 않으면, optimal이 \(\gamma\)에 의존하지 않음.
\(\rightarrow\) \(t\)를 random sampling하기 때문인 듯이점
- DDPM에서 \gamma를 1로 고정하는 것에 대한 정당성
- \(J_\sigma\)의 optimal도 \(L_1\)과 같음
Sampling from Generalized Generative Process
DDIM에서는 generative 뿐 아니라, \(\sigma\)에 의해 매개변수화된 forward도 배움
따라서, pre-trained DDPM을 사용하여 \(\sigma\)를 탐색
DDIM
Eq.10에 의해 \(x_t\)에서 \(x_{t-1}\)은
\[\begin{align} x_{t-1}=\sqrt{\alpha_{t-1}}\underbrace{\left(\frac{x_t-\sqrt{1-\alpha_t}\epsilon^{(t)}_\theta(x_t)}{\sqrt{\alpha_t}} \right)}_{\text{predicted} x_0}+\underbrace{\sqrt{1-\alpha_{t-1}-\sigma^2_t}\cdot\epsilon^{(t)}_\theta(x_t)}_{\text{direction pointing to } x_t}+\underbrace{\sigma_t\epsilon_t}_{\text{random noise}} \end{align}\]\(\sigma\)의 선택은 같은 \(\epsilon_\theta\)에서도 다른 생성 결과를 가짐
모든 \(t\)에서, \(\sigma_t=\sqrt{\frac{1-\alpha_{t-1}}{1-\alpha_t}}\sqrt{\frac{1-\alpha_t}{\alpha_{t-1}}}\)면, DDPM과 같음 (markovian)
모든 \(t\)에서, \(\sigma_t-0\)일 때, 모든 forward는 \(x_{t-1}, x_0\)에 대해 deterinistic \((t\neq 1)\)
\(\rightarrow\) 생성 process의 \(\epsilon_t\)의 계수는 0
\(\rightarrow\) Implicit probabilistic model (\(x_T\)에서 \(x_0\)로 정해진 길을 따라감)
\(\rightarrow\) DDIM (forward가 diffusion이 아니어도, 같은 objective function)
Accelerated generation process
\(q_\sigma(x_t\mid x_0)\)를 바로 구할 수 있기 때문에 재학습없이 step을 건너뛸 수 있음
\({x_{T_1}, \cdots , c_{T_s}}\)를 \(x_{1:T}\)의 subset이라고 가정하면, \(q(x_{T_i}\mid x_0)=\mathcal{N}(\sqrt{\alpha_{T_i}}x_0, (1-\alpha_{T_i})I)\)이며, 아래 그림과 같음
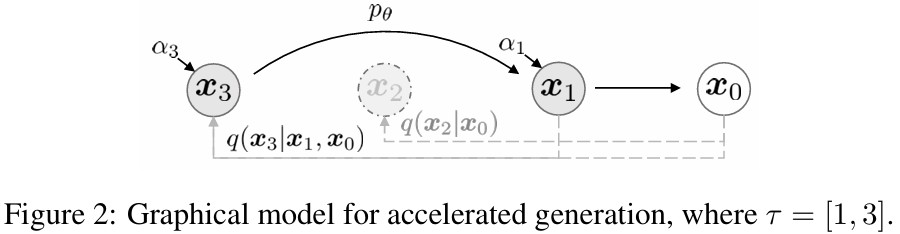
Reverse(\(\gamma\))에 따라 sampling 하면, T보다 \(\gamma\)가 작을 때, 계산 효율성 \(\uparrow\)
Eq.12와 같이 update 방식만 바꿔서 새롭고 빠른 sampling이 가능함
\(\rightarrow\) Appendix C
즉, 훈련은 T step만큼 하더라도, sampling은 그 일부만 사용 가능
그리고 연속적인 t에 대해 sampling도 가능함
Relevance to Neural ODEs
DDIM의 eq.12를 다시 쓰면,
\[\begin{align} x_{t-1}=\sqrt{\alpha_{t-1}}\underbrace{\left(\frac{x_t-\sqrt{1-\alpha_t}\epsilon^{(t)}_\theta(x_t)}{\sqrt{\alpha_t}} \right)}_{\text{predicted} x_0}+\underbrace{\sqrt{1-\alpha_{t-1}-\sigma^2_t}\cdot\epsilon^{(t)}_\theta(x_t)}_{\text{direction pointing to } x_t}+\underbrace{\sigma_t\epsilon_t}_{\text{random noise}} \end{align}\]ODE를 위한, Euler-Integration과 비슷함
\[\begin{align} \frac{x_t \delta t}{\sqrt{\alpha_t-\delta t}}=\frac{x_t}{\sqrt{\alpha_t}}+\left(\sqrt{\frac{1-\alpha_{t-\delta t}}{\alpha_{t-\delta t}}}-\sqrt{\frac{1-\alpha_t}{\alpha_t}} \right)\epsilon^{(t)}_\theta(x_t) \end{align}\]\(\sigma-\frac{\sqrt{1-\alpha}}{\alpha}, \bar{x}=\frac{x}{\sqrt{\alpha}}\)라 하면, continuous에서 \(\sigma, x\)는 \(t\)의 함수고, \(\sigma\)가 continuous일 때 eq.13은 아래와 같음
\[\begin{align} d\bar{x}(t)&=\epsilon^{(t)}_\theta\left(\frac{\bar{x}(t)}{\sqrt{\sigma^2+1}} \right)d\sigma(t),\\ &\text{init condition: } x(T)\sim\mathcal{N}(0, \sigma(\gamma)) \text{ for a very large } \sigma(\gamma) \end{align}\]\(\rightarrow\) 충분한 step으로 \(x_0, x_T\)를 discretize하면, \(x_0\)에서 \(x_T\)를 encoding하고 eq.14의 ODE를 reverse해서 simulate 가능
\(\rightarrow\) 즉, DDPM과 달리, DDIM은 Image \(\leftrightarrow\) Latent 1:1 matching이 가능
\(\rightarrow\) Scored-SDE의 probabilistic flow ODE와 비슷
\(\rightarrow\) DDIM은 continous DDPM의 special case
Proposition 1.
\[\begin{align}\frac{x_{t-\delta t}}{\sqrt{\alpha_{t-\delta t}}}=\frac{x_t}{\sqrt{\alpha_t}}+\frac{1}{2}\left(\frac{1-\alpha_{t-\delta t}}{\alpha_{t-\delta t}}-\frac{1-\alpha_t}{\alpha_t} \right)\cdot \sqrt{\frac{\alpha_t}{1-\alpha_t}}\cdot\epsilon^{(t)}_\theta(x_t)\end{align}\]
Optimal \(\epsilon^{(t)}_\theta\)와 eq.14의 ODE는 Score-SDE의 VE-SDE에 해당하는 Probabilistic flow ODE를 갖는다.
\(\rightarrow\) Appendix B.
ODE는 같지만, sampling은 다름
Probabilistic flow ODE의 Euler Method Update는하지만, step 선택에서 다름
- Proposed: \(d\sigma(t)\)
- Scored-SDE: \(dt\)
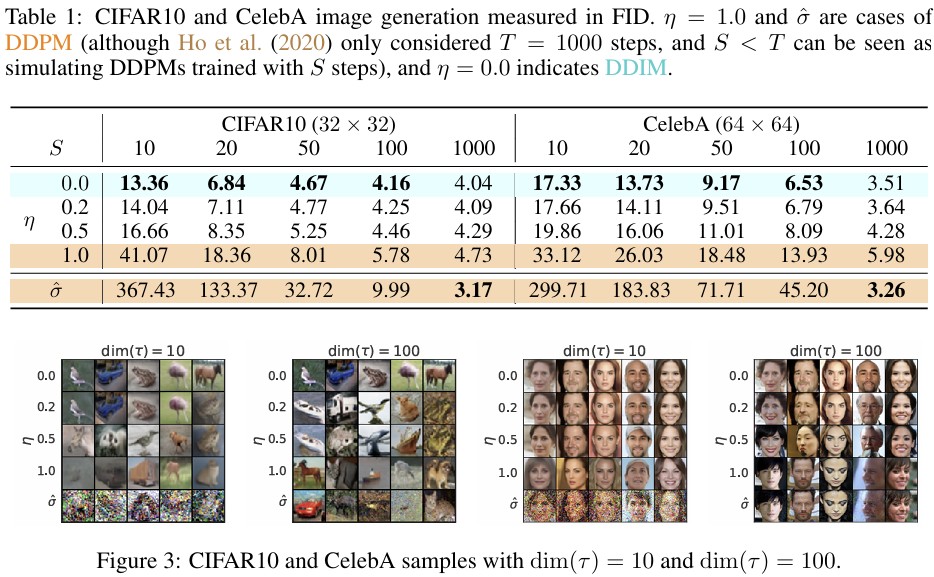
Experiments
Sample Quality and Efficiency
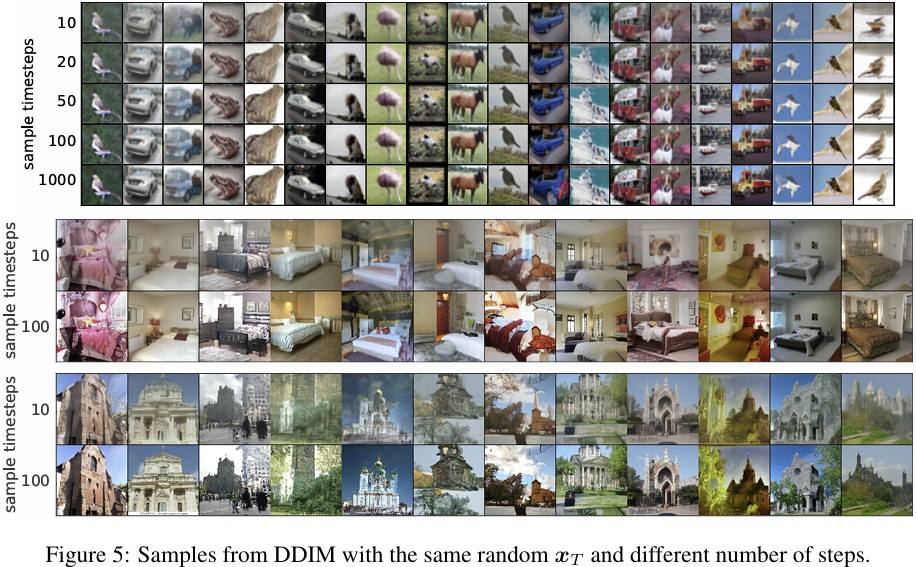
Sample Consistency in DDIM
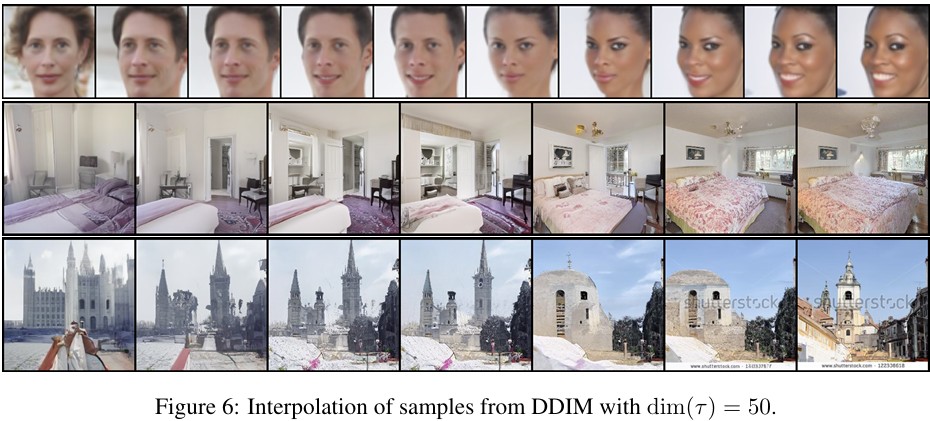
Interpolation in deterministic Generative Process
Reconstruction from Latent Space
